Follow Us x
FEATURES
- Real-time telemetry using cellular network
- Engine status current within 5-10 minutes
- Engine start/stop delay less than 5 secs (pre-programmed) or less than 1 minute (ad-hoc)
- Remote throttling
- Alerting capability via text messaging or phone calls (e.g. engine stops unexpectedly)
- Ability to program rules for auto start/stop based on other sensors (e.g. water level or temperature) and critical conditions (e.g. frost, low-water, soil moisture)
- Ability to integrate engine control into complete irrigation automation solution
- Option to add the Ranch Systems still-image camera option for visual pump monitoring
- User-defined reports in CSV or PDF
BENEFITS
- Save labor and travel costs associated with manual monitoring of engines
- Save fuel costs from unnecessary runtime
- Prevent pump wear and damage from dry running
- Predict and optimize refueling times by knowing exact run-times
- RanchMaster is capable of remote monitoring and controlling engine-driven equipment such as irrigation and mining pumps, generators or wind machines or any other engine-driven equipment. The solutions range from simple on-off monitoring using an oil pressure transducer to complete monitoring of engine statistics and start/stop of engine. The RanchMaseter RM210 or RS210 node unit is connected to the engine controller or transducers. This unit regularly samples key statistics and transmits back to the RanchMaster online software application. When the user decides to start or stop, or when indicated by a program defined online, the signal is transmitted back to the unit and then engine is started or stopped as required, typically within seconds. The connectivity can be via the cellular/mobile phone system or by direct internet connection.
Simple remote engine monitoring (no control)
The most economical solution allows only monitoring;no remote control is provided. An RS210 CELL unit is placed near or on the engine and a pressure transducer is attached to the pressure line, typically using a T near an existing pressure gauge. The RS210-CELL will upload data to the online application every 30 minutes, providing detailed historic data on engine run time. This can be used to indirectly determine such measures as gallons/kilolitres of irrigation water delivered, verification of frost protection equipment function and even the amount of fuel consumed.
Advanced engine monitoring and control (via Murphy Controller)
This is the most advanced solution provided both real-time monitoring and remote control. In this case a Murphy EMS-PRO controller is required. The Murphy controller is connected to an RM210 base station unit using a special cable providing both power and RS-485 network communications. Cellular/mobile coverage is required, or optionally a nearby direct Internet connection (e.g. WiFi). The RM210 will pull current engine data at regular intervals (typically 5 or 15 minutes) and deliver this to the online application via the cellular/mobile network. Whenever the user decides to turn engine on/off this is a few simply clicks in the online application. Control signals are then sent via cellular/mobile network to the RM210 and immediately after the RM210 will send the signal via the RS485 connection to the Murphy controller. Control delay depends on cellular/mobile network, but is typically less than 1 minute.
Screenshot: Typical time graph of key parameters
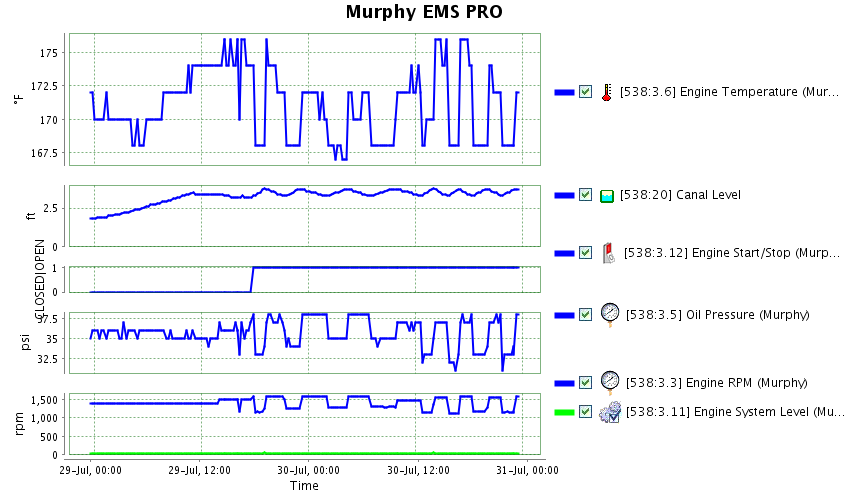
The following is typical data available online (depends on register map of Murphy controller used):
- RPM
- Engine temperature
- Engine battery level
- Oil pressure
- Engine running hours
- Miscellaneous engine status flags
- Discharge pressure (pump)
- In-take level indicators (such as reservoir level): The remote control can be ad-hoc, meaning the user decides to turn on or off and clicks a button in the online application. However, the control can also be programmed as part of an irrigation schedule and there by happen in a pre-determined fashion without requiring the user to go online. Finally, control could also happen as result of a rule reacting to input from another sensor in a Ranch Systems installation, such as a temperature sensor indicating frost or a level sensor indicating high or low water level.
